Præcisionsservo DC-motor 46S/185-8A

Grundlæggende funktioner i servo DC-motor: (andre modeller, ydeevne kan tilpasses)
| 1. Nominel spænding: | DC 7,4V | 5. Nominel hastighed: | ≥ 2600 rpm |
| 2. Driftsspændingsområde: | DC 7,4V-13V | 6. Blokering strøm: | ≤2,5A |
| 3. Nominel effekt: | 25W | 7. Belastningsstrøm: | ≥1A |
| 4. Rotationsretning: | CW udgangsaksel er over | 8. Akselafstand: | ≤1,0 mm |
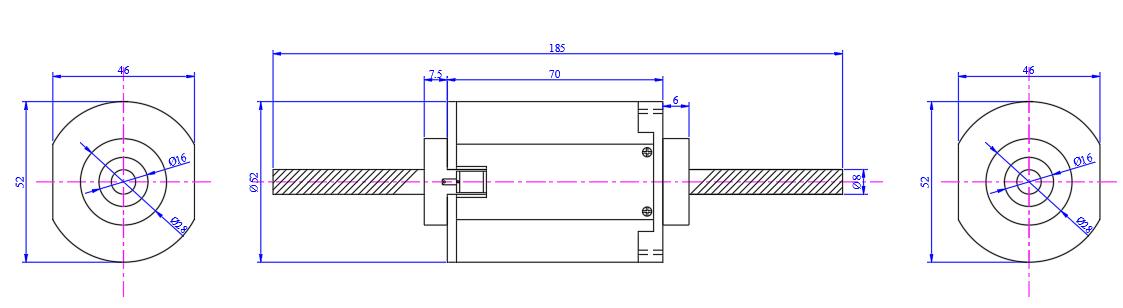
Produktets udseende diagram
Udløbstid
Siden produktionsdatoen er den sikre brugsperiode for produktet 10 år, og den kontinuerlige arbejdstid er ≥ 2000 timer.
Produktegenskaber
1. Kompakt, pladsbesparende design;
2. Kuglelejestruktur;
3.Lang levetid for børsten;
4. Ekstern adgang til børster tillader nem udskiftning for yderligere at forlænge motorens levetid;
5.Højt startmoment;
6.Dynamisk bremsning for at stoppe hurtigere;
7.Reversibel rotation;
8.Simpel to-leder forbindelse;
9.Klasse F isolering, højtemperatur svejsekommutator.
10. Høj ydeevne, høj omkostningsydelse og lav interferens.
Ansøgninger
Det er meget udbredt inden for smart hjem, præcisionsmedicinsk udstyr, bildrev, forbrugerelektronikprodukter, massage- og sundhedsudstyr, værktøjer til personlig pleje, intelligent robottransmission, industriel automation, automatisk mekanisk udstyr, digitale produkter osv.
Ydeevne illustration



Servosystem: Det er et automatisk kontrolsystem, der gør det muligt for output-kontrollerede mængder såsom position, orientering og tilstand af et objekt at følge enhver ændring i inputmålet (eller given værdi). Servoens hovedopgave er at forstærke, transformere og regulere effekten i overensstemmelse med kravene i styrekommandoen, så drejningsmomentet, hastigheden og positionsudgangen fra drivenheden kan styres meget fleksibelt og bekvemt.
På grund af sin "servo" ydeevne, er den navngivet en servomotor. Dens funktion er at konvertere indgangsspændingskontrolsignalet til udgangsvinkelforskydning og vinkelhastighed på akslen for at drive kontrolobjektet.
Princippet for DC-servomotor
Arbejdsprincippet for DC-servomotor er stort set det samme som for almindelig DC-motor. Det elektromagnetiske drejningsmoment genereres af armaturets luftstrøm og luftgabets magnetiske flux for at få servomotoren til at rotere. Normalt bruges ankerstyringsmetoden til at ændre hastigheden ved at ændre spændingen, mens excitationsspændingen holdes konstant. Jo mindre spænding, jo lavere hastighed, og når spændingen er nul, holder den op med at rotere. For når spændingen er nul, er strømmen også nul, så motoren vil ikke generere elektromagnetisk drejningsmoment, og det vil heller ikke fremstå som fænomenet selvrotation.







